

Dossier: “Aportes del pensamiento computacional a la educación en ciencias y tecnologías”
Análisis crítico de una experiencia “taller de robótica” desde una perspectiva piagetiana
Critical analysis of a “robotics workshop” experience from a Piagetian perspective
Revista IRICE
Consejo Nacional de Investigaciones Científicas y Técnicas, Argentina
ISSN-e: 2618-4052
Periodicidad: Frecuencia continua
núm. 49, e2091, 2025
Recepción: 05 junio 2025
Aprobación: 04 agosto 2025
Cómo citar: Esquivel, I. G., & Sklate Boja, M. F. (2025). Análisis crítico de una experiencia “taller de robótica” desde una perspectiva piagetiana. Revista IRICE, 49, e2091. https://doi.org/10.35305/revistairice.vi49.2091
Resumen: Este artículo presenta un análisis crítico de una experiencia de enseñanza en el marco de la asignatura Introducción a la Ingeniería Mecánica de la Facultad de Ciencias Exactas, Ingeniería y Agrimensura de la Universidad Nacional de Rosario (FCEIA-UNR), centrada en un taller de robótica orientado al desarrollo del pensamiento computacional. La experiencia se llevó a cabo en el laboratorio FabLabUNR e involucró la programación de robots educativos mediante entornos gráficos, promoviendo la resolución de problemas en un contexto técnico controlado. Desde un enfoque constructivista, y en diálogo con la teoría de la Epistemología Genética de Jean Piaget, se analiza el proceso de construcción del conocimiento a partir de la interacción entre el estudiante y el sistema técnico compuesto por el programa y el robot. Se propone una redefinición del objeto de aprendizaje como sistema programa-robot y se argumenta su potencial como mediador cognitivo en la formalización de nociones lógico-matemáticas y tecnológicas. En esta línea de análisis, practicamos una reinterpretación de la ley general de la cognición piagetiana, adaptada a escenarios donde la programación y la ejecución física convergen. De este modo, este trabajo parte de un análisis empírico situado en una práctica taller y concluye con un aporte teórico para explicar el desarrollo del pensamiento computacional en contextos de robótica educativa.
Palabras clave: robótica, educación, pensamiento computacional, ingeniería.
Abstract:
This article presents a critical analysis of a teaching experience carried out as part of the Introduction to Mechanical Engineering course at the Facultad de Ciencias Exactas, Ingeniería y Agrimensuraof the Universidad Nacional de Rosario (FCEIA-UNR). The experience centered on a robotics workshop was designed to foster computational thinking. Taking place at the FabLabUNR laboratory, it involved programming educational robots through graphical environments to promote problem-solving in a controlled technical setting. Adopting a constructivist perspective and engaging with Jean Piaget’s theory of Genetic Epistemology, the process of knowledge construction is analysed based on the interaction between the student and the technical system comprising the program and the robot. The learning object is redefined as a program-robot system, and its potential as a cognitive mediator in formalising logical, mathematical, and technological notions is discussed. Along this line of analysis, we propose a reinterpretation of Piaget's general law of cognition adapted to scenarios where programming and physical execution converge. This work therefore, begins with an empirical analysis based on workshop practice and concludes with a theoretical contribution that explains how computational thinking develops in educational robotics contexts.
Keywords: robotics, education, computational thinking, engineering.
Introducción
En este trabajo nos proponemos abordar aspectos vinculados a la robótica educativa en relación al desarrollo del pensamiento computacional en el marco de la enseñanza de la ingeniería, adoptando una perspectiva crítica que permita problematizar las prácticas pedagógicas tradicionales y revalorizar aquellas experiencias que promueven un aprendizaje activo, significativo y situado. Para ello, articulamos nuestro análisis con la teoría constructivista del conocimiento desarrollada por Jean Piaget, enfocándonos particularmente en sus aportes sobre la construcción del conocimiento y el desarrollo del pensamiento lógico en los individuos. Este marco teórico nos brinda herramientas para comprender el aprendizaje no como una simple acumulación de saberes, sino como un proceso dinámico de construcción que implica transformación, reorganización y adaptación del conocimiento a partir de la interacción con el entorno.
El recorte empírico de este análisis se sitúa en una experiencia concreta dentro del curso Introducción a la Ingeniería Mecánica, perteneciente a la carrera de Ingeniería Mecánica de la Facultad de Ciencias Exactas, Ingeniería y Agrimensura de la Universidad Nacional de Rosario (FCEIA-UNR). Esta asignatura se dicta durante el primer cuatrimestre del primer año de la carrera y está destinada, por lo tanto, a estudiantes ingresantes. Su diseño curricular responde a una concepción pedagógica en la cual el hacer y la experiencia práctica ocupan un lugar central en la construcción del conocimiento, promoviendo una apropiación activa de las técnicas y tecnologías que atraviesan la práctica profesional de la ingeniería.
En particular, nos centramos en una de las actividades incluidas en el curso, el taller de robótica, ya que esta experiencia pedagógica resulta valiosa para analizar el aprendizaje en tanto proceso de crecimiento cognitivo y de cambio. A través de la interacción con un sistema que articula software y hardware, los estudiantes construyen conocimientos significativos, desarrollan habilidades prácticas, y se apropian de herramientas técnicas desde una lógica de participación activa y reflexión crítica. En este sentido, la propuesta se inscribe en una concepción de la enseñanza de la ingeniería que busca formar profesionales capaces de enfrentar problemas complejos de manera creativa, colaborativa y situada.
Esta propuesta se desarrolla en un espacio especialmente acondicionado para tales fines, el laboratorio FabLabUNR, perteneciente a la Escuela de Ingeniería Mecánica. El taller está concebido como una instancia de participación activa y de trabajo colaborativo, donde los estudiantes son protagonistas del proceso de aprendizaje y construyen conocimiento a partir de la exploración, la experimentación y la resolución de problemas concretos. Lejos de una enseñanza basada en la transmisión unidireccional de contenidos, aquí se pone en juego una lógica de aprendizaje basada en la acción, la interacción y la reflexión.
Durante el desarrollo del taller, los estudiantes trabajan con kits de robótica basados en placas Arduino y configuran su operación utilizando un entorno de programación por bloques. El objetivo es lograr que el robot cumpla una serie de tareas predeterminadas, lo cual implica no solo entender el funcionamiento del software, sino también comprender y anticipar el comportamiento físico del dispositivo en interacción con su entorno. En un primer momento, la aproximación al desafío se da de forma intuitiva: los estudiantes manipulan el robot, prueban comandos básicos y observan las respuestas. Esta interacción directa con el objeto de aprendizaje cumple un rol clave, ya que permite una transición progresiva desde una comprensión intuitiva hacia una comprensión conceptual más precisa, en la que se integran saberes físicos, tecnológicos y computacionales.
Este proceso de aprendizaje, en el que la interacción con el objeto (en este caso, el sistema compuesto por el programa y el robot) se vuelve el eje central, puede ser analizado desde la teoría psicogenética de Piaget. Para Piaget (1977), el conocimiento se construye a partir de la acción del sujeto sobre los objetos, en una relación de asimilación y acomodación que permite el desarrollo de estructuras cognitivas cada vez más complejas. En este sentido, el objeto de aprendizaje no es algo dado, sino que se define en función de la actividad que el sujeto realiza con él. En el caso que analizamos, este objeto puede pensarse como el sistema programa-robot, entendido no como una suma de partes sino como un conjunto integrado que exige ser comprendido en su lógica operativa y en sus condicionantes materiales. Es en este punto donde se sitúan los desafíos centrales del trabajo: problematizar qué entendemos por objeto de aprendizaje cuando se trata de sistemas híbridos, en los que lo virtual y lo físico se entrelazan de manera inseparable, y qué implicancias tiene esto en la forma en la que el sujeto construye conocimiento. Entonces, surge el interrogante sobre si la ley general de la cognición será válida en este contexto y, en tal caso, cómo debe ser aplicada.
La actividad propuesta en el taller exige de los estudiantes una serie de operaciones cognitivas complejas: interpretar el problema planteado, identificar las variables relevantes, establecer relaciones causales entre acciones y reacciones, traducir esas relaciones a un lenguaje de programación y, finalmente, testear y ajustar el programa a partir de los resultados observados en la ejecución del robot. El ensayo y error se vuelve así una herramienta fundamental, no solo para ajustar el funcionamiento del dispositivo, sino también como estrategia de aprendizaje que permite consolidar saberes a partir de la experiencia.
De esta forma, el objetivo del taller trasciende la simple elaboración de un código funcional. Se trata, en realidad, de lograr que ese código pueda ser transferido y aplicado de manera efectiva en un objeto físico concreto: el robot. Este pasaje del mundo virtual al mundo físico pone en juego una serie de desafíos técnicos, pero también conceptuales, que obligan a los estudiantes a pensar en términos sistémicos, integrando conocimientos de diversas áreas y enfrentándose a las restricciones propias del mundo material (como la fricción, el peso, la velocidad, entre otras). Es precisamente en esta intersección entre lo abstracto y lo tangible donde se potencia la construcción del pensamiento computacional, entendido aquí no como una habilidad meramente informática, sino como una forma de pensamiento transversal, que implica descomponer problemas, formular soluciones algoritmizadas, evaluar resultados y adaptarse a nuevas condiciones.
Marco teórico
En las últimas décadas, la computación se ha integrado a casi la totalidad de los rubros y actividades económicas, sociales, productivas y científicas, al punto que se ha convertido en una disciplina en sí misma: la ciencia computacional. Al igual que la matemática, la física, la química y la ingeniería, que son disciplinas diferentes pero mantienen entre sí una relación transdisciplinar –donde, por ejemplo, la matemática representa el sustrato esencial de todas las demás y la ingeniería integra los aportes de todas ellas–, la ciencia computacional se ha convertido de manera análoga en una disciplina transversal a las demás. Esta relación disciplinar es analizada por Lodi y Martini (2021) en un trabajo enfocado en discutir el concepto de pensamiento computacional en relación a su acuñamiento histórico y la reafirmación de su relevancia en las currículas educativas.
Esta última cuestión ha sido objeto de crecientes debates, tanto en el ámbito científico como en las esferas políticas y técnicas encargadas de diseñar los planes de estudio de los diferentes niveles de la educación formal, desde la educación inicial hasta la superior. El punto de inflexión en la popularidad del término pensamiento computacional parece situarse en las declaraciones de Jeannete Wing durante una de sus conferencias, en la que plantea que este debería ser promovido de manera universal, ya que aprender a pensar como un cientista de la computación sería un beneficio independientemente del campo disciplinar de cada persona (Wing, 2006). A partir de esta exposición, parece existir una tendencia (global) a incluir contenidos referentes a la programación y el pensamiento computacional en las currículas educativas sin demasiada precisión didáctica ni epistemológica. En vistas de esta situación, Lodi y Martini (2021) revisan, contraponen y recuperan los aspectos valiosos del concepto de pensamiento computacional en la enseñanza según sus principales referentes: Jeannete Wing y Seymour Papert.
Si bien no es el objetivo de nuestro trabajo discutir estos conceptos, sí necesitamos de una definición de pensamiento computacional para la construcción de nuestra hipótesis. En este sentido, la síntesis que realizan Lodi y Martini (2021) nos resulta de gran utilidad. De Wing, recuperan la idea de la computación como ciencia, donde el pensamiento computacional resulta el sustrato necesario para la adquisición de competencias técnicas. De Papert conservan la idea construccionista en la cual solo el envolvimiento social y afectivo del estudiante en la construcción del artefacto computacional hará posible que la programación sea una herramienta que permita también la construcción de conocimiento en otras disciplinas. Para nuestro trabajo nos basamos fuertemente en este último aspecto: la perspectiva construccionista.
El aprendizaje en programación, especialmente en etapas iniciales, plantea desafíos significativos para los estudiantes, quienes deben comprender tanto los conceptos abstractos de algoritmos y estructuras de datos, como el hecho de que tales algoritmos deben ser ejecutados por una máquina. En este contexto, la teoría de la Epistemología Genética de Jean Piaget proporciona un marco útil para entender cómo los estudiantes construyen conocimiento a través de la interacción activa y el descubrimiento. Según Piaget (1977), el aprendizaje es un proceso constructivo en el cual el sujeto interactúa con el entorno, llevando a cabo una serie de transformaciones cognitivas que le permiten construir y reorganizar sus estructuras mentales.
Para Piaget, el conocimiento no se adquiere pasivamente; el aprendizaje implica actuar sobre los objetos y el entorno, y estas acciones facilitan la construcción de esquemas mentales que permiten al individuo entender y manipular el mundo que lo rodea. Este enfoque es relevante en el aprendizaje de la programación, donde los estudiantes deben relacionar conceptos abstractos, como algoritmos y estructuras de datos, con su ejecución en un contexto real a través de dispositivos o software. La ley general de la cognición de Piaget (1964), que describe la relación dialéctica entre acción y pensamiento, establece que las acciones guían el pensamiento inicial del estudiante, mientras que el pensamiento abstracto refina esas acciones en un proceso continuo. Esto se traduce en que, en el contexto de la programación, los estudiantes primero experimentan el funcionamiento de un programa mediante la interacción con un entorno práctico, y luego conceptualizan los elementos de dicho entorno en términos de reglas y algoritmos.
Piaget también distingue tres tipos de abstracción: empírica, pseudoempírica, y reflectiva. En particular, utilizó el concepto de reflective abstraction (pensamiento abstracto) para explicar cómo es el proceso de desarrollo de estructuras lógico-matemáticas abstractas en niños (Beth & Piaget, 1966). Cetin y Dubinsky (2017) analizan el rol del pensamiento abstracto en el pensamiento computacional y cómo es un concepto clave para la adquisición de habilidades relacionadas a este campo.
En un trabajo desarrollado con estudiantes de secundaria, da Rosa Zipitra y Aguirre Dorelo (2018) toman los aportes de Papert para realizar un enfoque complementario a través de su teoría del aprendizaje mediante programación. Allí se destaca la importancia de la reflexión sobre las propias acciones para desarrollar una comprensión conceptual. Se propone que los estudiantes puedan aprender a programar al "enseñar" a un autómata a ejecutar una tarea que ellos mismos realizarían. En este proceso, es necesario abstraer sus propias estrategias de resolución de problemas y traducirlas en instrucciones específicas para el autómata. Esto fomenta la reflexión sobre el proceso de toma de decisiones y les ayuda a comprender la relación entre las acciones (instrucciones) y los resultados en un sistema computacional.
Este marco constructivista resalta que la enseñanza de la programación debería partir de niveles no formales o prácticos que los estudiantes ya dominan, permitiéndoles avanzar gradualmente hacia una conceptualización formal de algoritmos y estructuras de datos. En este sentido, los juegos y actividades interactivas permiten explorar y construir conocimiento de manera lúdica y accesible. Durante el proceso, los estudiantes se enfrentan a problemas y deben tomar decisiones para resolverlos, lo cual les permite desarrollar habilidades en la manipulación de objetos y entender las consecuencias de sus acciones en un entorno controlado. Posteriormente, pueden formular inferencias y reglas en lenguaje natural, lo cual constituye un primer paso hacia la abstracción necesaria para entender conceptos de programación más complejos.
Por lo tanto, el enfoque constructivista, basado en las teorías de Piaget y Papert, sugiere que el aprendizaje de la programación se facilita cuando los estudiantes pueden experimentar y reflexionar en etapas. Primero, mediante la manipulación activa, construyen un conocimiento instrumental o práctico que les permite interactuar con el sistema. Luego, a través de una reflexión guiada sobre las reglas y secuencias de acciones, comienzan a conceptualizar estos elementos en términos de inferencias y algoritmos, acercándose así a la formalización del conocimiento. Esta progresión gradual es fundamental para asegurar que el aprendizaje de la programación no solo sea comprensible, sino también significativo y aplicable en contextos diversos.
Esta perspectiva constructivista viene cobrando gran relevancia en las últimas décadas dentro de los ámbitos de la enseñanza de las ciencias. Tal es la diversidad de trabajos –y por lo tanto de aplicaciones y marcos referenciales– vinculados a esta perspectiva de base, que se definen nuevas categorías debido a las particularidades o vinculación con otros autores o teorías de referencia. Por ejemplo, Gabbanelli y Szigety (2023) aplican una perspectiva basada en la indagación (inquiry-based learning) con estudiantes de último año de secundaria. En ese trabajo también utilizan un robot, entendido como elemento tecnológico que facilita la aplicación de enfoques didácticos basados en la participación activa de los estudiantes, para indagar en conceptos de la física como movimiento, velocidad, fuerza, energía, potencia, rendimiento.
Más aún, el impacto de la implementación de la robótica en los espacios de enseñanza es tan potente que se ha acuñado el concepto de robótica educativa como marco pedagógico. Se suele indicar como su inicio a las experiencias en programación con lenguaje LOGO realizadas por Papert y el equipo de trabajo del Massachusetts Institute of Technology (MIT) en la década de 1980 (Vernal Navarrete & Meléndez Araya, 2021). Algunos autores remarcan que la programación del robot no constituye el fin de la actividad realizada en el marco de la robótica educativa, sino un medio para comprender la consigna sobre la cual se propone el trabajo, ya sea que esta implique lógica proposicional (Villacrés-Sampedro et al., 2020) o aspectos de ciencias básicas (Torres Pardo et al., 2019). En el presente trabajo disentimos de esa idea; consideramos que el objeto de estudio sobre el cual se produce la construcción de conocimiento lo compone el sistema programa-robot y, de forma adicional, que en ese proceso otros aspectos vinculados a las ciencias básicas pueden ser asimilados o reinterpretados.
En una extensa revisión bibliográfica, Mejía et al. (2022) analizan la relación entre la robótica educativa y el pensamiento computacional. Se observa que, en la mayoría de los trabajos consultados, se indica una relación en la cual los proyectos que hacen uso de la robótica y las interfaces de programación gráfica generan una contribución al desarrollo de la capacidad de resolución de problemas y las habilidades de pensamiento computacional. Sin embargo, se reconoce que muchos de estos estudios carecen de un diseño experimental o cuasiexperimental que permita conectar sus bases teóricas con su implementación, presentan dificultades para definir límites explícitos de lo que significa el pensamiento computacional y, en suma, evidencian la necesidad de validar los aportes de la robótica educativa en este ámbito mediante evidencia investigativa.
Descripción de la experiencia
Los estudiantes participaron de una experiencia práctica orientada al aprendizaje en el FabLabUNR, donde exploraron conceptos fundamentales de robótica y programación mediante actividades grupales conformadas por entre cinco y seis integrantes. Esta propuesta se enmarcó en un acercamiento inicial al campo de la ingeniería y al paradigma maker (Rodríguez et al., 2022), promoviendo tanto el desarrollo de habilidades técnicas como el fortalecimiento de competencias blandas, tales como el trabajo colaborativo, la resolución de problemas y el aprendizaje entre pares.
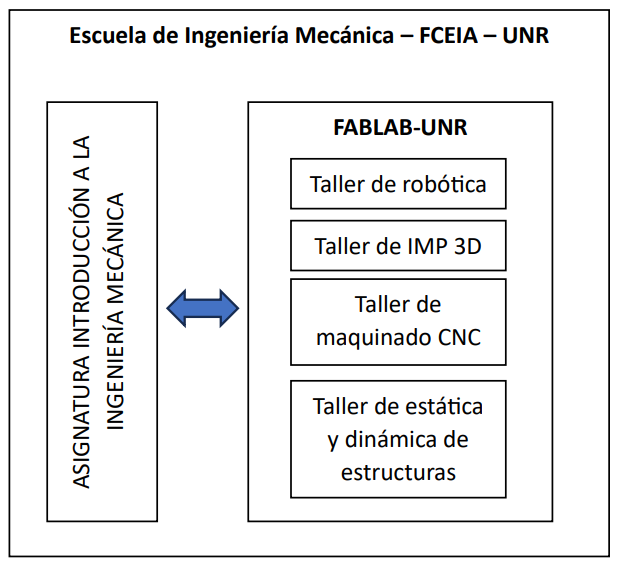
El FabLabUNR forma parte de una red internacional de laboratorios de fabricación digital, y está equipado con diversas herramientas tecnológicas –como impresoras 3D, cortadoras láser, fresadoras CNC y kits de electrónica– que permiten llevar adelante proyectos interdisciplinarios vinculados con las llamadas tecnologías 4.0. En este sentido, el FabLabUNR no solo funciona como un espacio educativo, sino también como un entorno de experimentación e innovación tecnológica donde convergen saberes de distintas áreas (ver Figura 1).
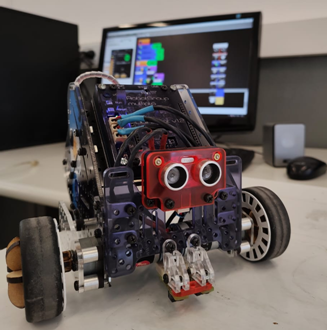
Durante la jornada, los participantes programaron placas Arduino UNO para controlar el movimiento de un vehículo autónomo tipo auto-robot (Figura 2) en un entorno de prueba. Este robot, equipado con sensores infrarrojos, ultrasónicos y de distancia, fue programado para ejecutar tareas como el seguimiento de líneas, la detección y esquive de obstáculos y la medición de distancias recorridas.
Estas actividades no solo sirvieron como introducción a la programación estructurada y a conceptos básicos de robótica, sino que también permitieron ejemplificar de forma concreta cómo estas tecnologías se aplican en contextos reales. Por ejemplo, el seguimiento de líneas remite a tecnologías de automatización industrial utilizadas en líneas de montaje, mientras que la detección de obstáculos tiene aplicaciones directas en el desarrollo de vehículos autónomos y en robots de asistencia agrícola capaces de recorrer campos evitando accidentes o zonas intransitables. A su vez, la medición de distancias es una funcionalidad esencial en tareas de logística inteligente y monitorización en entornos industriales.
Este tipo de propuestas permiten poner en diálogo el aprendizaje técnico con su proyección práctica, promoviendo una visión integral del conocimiento que contempla tanto el saber hacer como el saber para qué. En línea con el enfoque construccionista, se buscó que los estudiantes se involucren activamente en el proceso de construcción de artefactos, apropiándose de los conceptos mediante la acción y la reflexión.
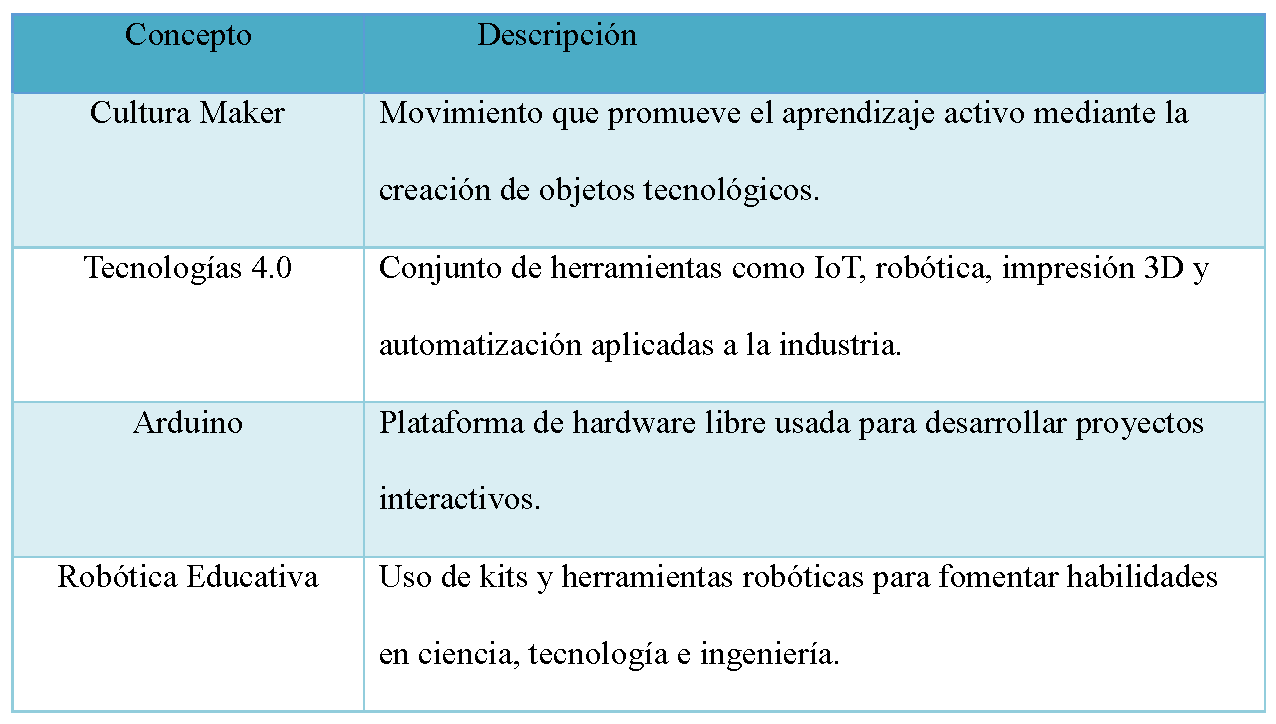
A fin de clarificar algunos conceptos utilizados se detallan sus definiciones en la Tabla 1.
Descripción del robot y de la interfaz gráfica usada
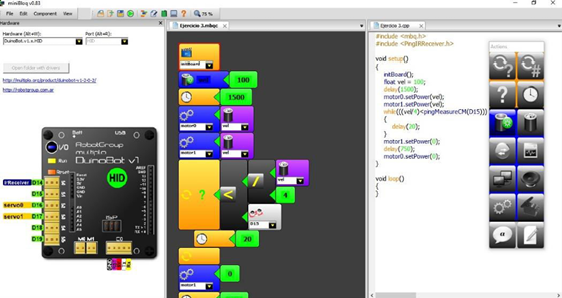
El robot utilizado en el taller fue el Múltiplo N6, un robot educativo diseñado en Argentina por RobotGroup. Este modelo consta de dos motores de corriente continua independientes para las ruedas delanteras, una rueda trasera pequeña de movimiento libre, dos sensores infrarrojos reflexivos para detectar luz y un sensor ultrasónico para medir la distancia a obstáculos. Este robot, controlado por una placa DuinoBot 2.4 compatible con Arduino, se programó utilizando la plataforma visual Minibloq (Figura 3), que facilita la programación mediante bloques y permite observar el código generado en tiempo real.
Desarrollo de la actividad
La propuesta pedagógica del taller se estructuró en varias etapas diseñadas para guiar progresivamente a los estudiantes desde una aproximación inicial al espacio y al equipo de trabajo, hacia la implementación práctica de conceptos de robótica y programación. A continuación, se detallan las fases que conformaron la experiencia:
Durante esta etapa se entregaron los kits de trabajo (auto-robots basados en placas Arduino con sensores) y se explicó la interfaz de programación por bloques que se utilizaría. También se presentó el esquema metodológico del taller, que contempló:
Trabajo colaborativo: la resolución de desafíos requería la organización en grupos de cinco a seis estudiantes, promoviendo el aprendizaje entre pares y la distribución de roles técnicos y de liderazgo.
Valoración de saberes previos: se incentivó a los estudiantes a identificar habilidades individuales dentro del grupo (experiencia con electrónica, lógica, trabajo manual, etc.) y ponerlas al servicio del proyecto común, favoreciendo así una dinámica activa y creativa.
Exploración inicial: los estudiantes programaron el movimiento del robot en línea recta, experimentando con distintas velocidades y observando su comportamiento. Esto permitió familiarizarse con los comandos básicos y los efectos de las variables de velocidad y tiempo.
Desafío con sensores: se propuso un segundo reto en el que debían diseñar un algoritmo que permitiera al robot avanzar hasta detectar un obstáculo mediante su sensor ultrasónico, frenar y realizar un giro de 180°. La lógica de control incluía la lectura de sensores y el uso de estructuras condicionales, fortaleciendo la comprensión del flujo lógico del programa.
Medición indirecta de distancias: como parte del proceso de validación de los resultados, se propuso comparar la distancia recorrida por el robot siguiendo una línea impresa en el suelo (cuya longitud fue medida previamente con una cinta métrica), con la estimación teórica obtenida a partir del número de revoluciones de las ruedas del robot (registradas por el sistema mediante un contador de pasos del motor o estimación por tiempo). Esta actividad introdujo una reflexión sobre la precisión, el error y la relación entre el mundo físico y los modelos computacionales.
Durante toda esta etapa se promovió una actitud de ensayo y error, en la que el error fue concebido como una instancia de aprendizaje. Los docentes circularon por los grupos para acompañar, orientar y realizar intervenciones técnicas o didácticas en función de las necesidades de cada equipo.
Objetivos del taller
Este taller tuvo como propósito principal ofrecer un primer acercamiento a la ingeniería desde una perspectiva experimental, activa y participativa. Se buscó que los estudiantes pudieran vivenciar, en un entorno práctico y colaborativo, algunos de los principios y desafíos que atraviesan la disciplina. En particular, se plantearon los siguientes objetivos:
Análisis
Durante el taller de robótica los estudiantes practicaron la descomposición de tareas complejas en procesos más simples, el ajuste de variables en experimentos controlados, y reflexionaron sobre la precisión de las mediciones indirectas. Además, exploraron el valor de la predicción de eventos y la importancia de iterar y validar procesos de mejora en un contexto controlado. Abordaron principios de cinemática y geometría, pensamiento algorítmico, automatización de procesos y robótica aplicada. Además, comprendieron cómo las instrucciones programadas se traducen en acciones en el hardware. A partir del aprendizaje construido mediante la experiencia realizada, los participantes del taller pudieron pensar posibles aplicaciones a nivel industrial de esta tecnología y reconocieron el rol fundamental del ingeniero mecánico en procesos de producción automatizados. La experiencia propició un ambiente de aprendizaje significativo, incentivando la creatividad y el interés de los estudiantes en la ingeniería, así como la relevancia de la colaboración y la innovación en el desarrollo profesional.
Objeto de aprendizaje
Para el análisis de esta experiencia, adoptamos como objeto de aprendizaje el sistema programa-robot, entendiendo que el aprendizaje de los estudiantes no se limita a la comprensión del código por un lado o del dispositivo físico por otro, sino que emerge precisamente de la interacción entre ambos componentes. Esta decisión se apoya en dos aspectos clave observados durante el taller: Por un lado, los sensores y actuadores del robot generan o requieren señales que deben ser interpretadas y traducidas mediante el programa. Es decir, los sensores no “hacen” algo por sí mismos, sino que entregan información que debe ser gestionada por instrucciones lógicas codificadas para generar una respuesta. Por otro lado, al explorar el software, los estudiantes no solo manipulan estructuras de programación abstractas, sino que lo hacen considerando sus efectos sobre los elementos terminales del hardware. Así, la programación no se da como ejercicio aislado, sino que se construye en función de la interacción físico-digital. Desde esta perspectiva, el objeto de aprendizaje no es únicamente el robot como entidad material, ni el código como herramienta de control, sino el sistema integrado que se construye al programar un comportamiento en función de un entorno físico determinado. Este enfoque responde a una visión sistémica del aprendizaje técnico, promoviendo la comprensión de la robótica como tecnología sociotécnica.
Durante la actividad, los estudiantes realizaron inicialmente una exploración del robot identificando sus componentes: motores, sensores de proximidad, ruedas y sensores ópticos. Reconocieron que estos elementos generan o requieren señales y que su uso exige una mediación lógica expresada en el código. A partir de esta comprensión inicial, comenzaron a listar y codificar cada uno de los elementos involucrados en el control del sistema (ver Tabla 2), lo cual favoreció la construcción de una representación más robusta del funcionamiento del conjunto.
Esta representación sistémica se consolidó a medida que avanzaban en la programación de tareas como el seguimiento de línea, el frenado ante obstáculos y el giro automático, actividades que exigieron tanto el ajuste de parámetros físicos como la adaptación del algoritmo. De este modo, se promovió una comprensión situada del vínculo entre software y hardware, esencial para el abordaje de tecnologías 4.0.
Por otro lado, los participantes del taller exploraron inicialmente la interfaz de programación en bloques, identificando de manera intuitiva –a través de los dibujos mostrados en dicha interfaz– los distintos componentes presentes, como motores, sensores y otros elementos propios de relaciones lógicas o condicionales. De esta manera, la idea intuitiva de que el robot necesita un programa para poder funcionar se fue concretizando progresivamente a través de estos recursos. Esta instancia representa el primer paso para que los estudiantes puedan desarrollar nuevos conocimientos sobre el objeto de aprendizaje.

En el siguiente paso, el trabajo se enfocó en la programación entendida en términos del sistema programa-robot, asignando a las variables utilizadas en el programa la codificación previamente establecida para los elementos físicos del robot (ver Tabla 2). Por ejemplo, al indicar en el programa la velocidad de rotación al motor M1, esta se expresó en términos porcentuales (0-100%), es decir que el valor máximo (100%) corresponde a la velocidad máxima del motor comandado. En consecuencia, el valor asignado no es abstracto ni puede ser establecido de forma absoluta (por ejemplo, avanzar a 1 m/seg), sino que estará referido a la capacidad (relación de velocidad y potencia) del motor en particular que el robot tiene incorporado. Remarcamos este aspecto porque muestra cómo es el sistema programa-robot sobre el que se indaga y se construye conocimiento como un conjunto.
Relación actores-objeto
En el taller de robótica, se muestra que el aprendizaje de programación y la construcción de conocimientos técnicos se enriquecen al integrar actividades prácticas con momentos de reflexión y conceptualización progresiva. Este enfoque promueve un aprendizaje activo y significativo, donde los estudiantes pueden avanzar desde la manipulación directa de un objeto hacia la construcción de modelos abstractos y la comprensión de principios de programación, permitiendo un aprendizaje integrado y fundamentado (D’Angelo et al., 2022).
Este taller se convierte en un espacio pedagógico fundamental que facilita la construcción activa del conocimiento y la adquisición de competencias en programación y manipulación de objetos técnicos. Este proceso, que tiene en cuenta los principios de la Epistemología Genética de Piaget, se apoya en la idea de que el aprendizaje significativo ocurre cuando los estudiantes participan activamente en la manipulación y exploración del objeto de conocimiento, como en este caso, el sistema compuesto programa-robot. La integración de los principios de Piaget y García (1982) destaca la relevancia de iniciar el aprendizaje desde la experiencia concreta y llevarlo progresivamente hacia niveles de abstracción superiores. En este sentido, a continuación, describiremos el proceso de acercamiento y reflexión sobre el objeto de aprendizaje, en el cual se siguen varias instancias que presentan gran similitud con otros trabajos en el marco de la robótica educativa (por ejemplo, Gabbanelli & Szigety, 2023).
En el marco de este taller, los estudiantes comienzan con una interacción práctica, manipulando físicamente el robot y observando sus respuestas. Este enfoque les permite establecer un vínculo directo entre sus acciones y los resultados en el objeto, facilitando la construcción de esquemas cognitivos básicos que organizan sus experiencias y conocimientos previos.
A medida que avanzan en esta experiencia, son desafiados a aplicar conceptos teóricos, como velocidad o movimiento, y a traducirlos en instrucciones de programación para el robot. Este proceso de vinculación entre conocimientos declarativos y procedimentales fomenta la reflexión sobre cómo se realiza una tarea manualmente y cómo se traduce esa tarea en instrucciones para una máquina. Este acto de programación demanda que los estudiantes se adapten cognitivamente: los esquemas cognitivos existentes se modifican para incorporar conocimientos nuevos y más complejos, promoviendo así un aprendizaje más profundo y abstracto.
El proceso de prueba y error dentro del taller refuerza este aprendizaje reflexivo, funcionando como un ciclo iterativo que permite a los estudiantes validar sus hipótesis en función de los resultados obtenidos y ajustar sus esquemas mentales conforme a la retroalimentación. Este ciclo iterativo entre teoría y práctica no solo refuerza la comprensión de los conceptos, sino que también permite la construcción de un conocimiento que transita de lo concreto a lo formal, de acuerdo con la ley de la cognición de Piaget (da Rosa Zipitria & Aguirre Dorelo, 2018).
Formalización del proceso de construcción de conocimiento
En el marco del enfoque teórico utilizado, vemos que la ley general de la cognición de Piaget puede ser adaptada, o mejor dicho extendida, para el caso específico del aprendizaje en programación y pensamiento computacional, tal como expresan da Rosa Zipitria & Aguirre Dorelo (2018) en el ya citado trabajo (Figura 4).
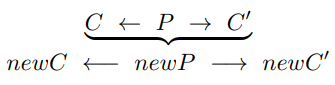
Donde P representa la más inmediata reacción del sujeto, centrada en obtener el resultado deseado; C, la toma de conciencia de la coordinación de sus acciones, es decir, la construcción del método o algoritmo empleado para resolver el problema; C’, la toma de conciencia de las modificaciones que la aplicación del algoritmo impone a los objetos o estructuras de datos; y las flechas representan la toma de conciencia del algoritmo empleado y de las razones de éxito. Es decir, se trata del mecanismo interno del proceso de pensamiento algorítmico.
En el renglón inferior, newP es una nueva periferia que representa el proceso mediante el cual el sujeto resuelve el problema; newC y newC’, la toma de conciencia de los elementos requeridos para que el computador resuelva el problema; y las flechas, la toma de conciencia del programa ejecutado por la computadora.
Además del trabajo de da Rosa Zipitria y Aguirre Dorelo (2018), no hemos encontrado en la bibliografía consultada otras referencias a la posibilidad de extensión de la ley general de cognición de Piaget.
En el caso analizado en este trabajo, como se mencionó previamente, surge un nuevo actor en el objeto de aprendizaje: el conjunto programa-robot. Por lo tanto, el marco de análisis no puede limitarse exclusivamente al ámbito computacional, sino que requiere una reinterpretación de la ley previamente mencionada, incorporando la presencia de este actor. El robot, como elemento físico, materializa lo previamente codificado en la computadora, añadiendo una dimensión tangible y mecánica al proceso de aprendizaje.
Para extender la ley general de la cognición de Piaget al caso del aprendizaje computacional en interacción con un robot, es necesario considerar las dinámicas particulares que emergen de esta relación. En este contexto, pensamos que la extensión no podrá obtenerse como una simple incorporación de la dimensión “robot” a la lógica ya existente, sino que requiere repensar en términos de la interacción del estudiante con un objeto nuevo compuesto por un programa construido para que un robot cumpla una tarea, y por el propio robot realizando acciones mediante el comando de dicho programa.
En este sentido, consideramos que no existe una relación de orden entre la instancia de generación del programa y su aplicación para comandar el robot –no nos referimos al orden temporal, que sí podría existir, sino al orden cognoscitivo que es lo que se intenta representar con la ley extendida–, como sí ocurre entre la instancia de construcción algorítmica y la de programación. Por esto pensamos que la adaptación de la ley general de Piaget no requiere necesariamente la incorporación de un nuevo “renglón inferior” en la ley extendida, sino una reinterpretación de la nueva instancia que involucra al conjunto programa-robot.
Si el nuevo renglón en la ley extendida se incorporara por la necesidad de comprender lo que sucede dentro de la computadora, en el caso de estudio resulta evidente que es necesario conocer la interacción entre el robot y el programa para lograr resolver el problema consignado, es decir, para asegurar que el programa diseñado y aplicado al robot cumpla con la tarea preestablecida.
En esta nueva interpretación, la periferia inicial P abarcaría la reacción inmediata del sujeto al buscar un resultado, pero teniendo en horizonte la interacción directa con las propiedades físicas del robot, como motores, sensores y actuadores. La coordinación de las acciones C implica ahora no solo la construcción del algoritmo, sino también la integración de las limitaciones y posibilidades impuestas por la mecánica y la física del robot. La toma de conciencia C′ se amplía para incluir las modificaciones que el algoritmo produce tanto en los objetos virtuales como en el comportamiento físico del robot. Por su parte, la nueva periferia newP representa el proceso mediante el cual el sujeto resuelve el problema computacional, pero referido a qué tan bien la resolución del problema se adapta a las condiciones físicas reales. NewC y newC′ incluyen la toma de conciencia de los elementos necesarios para que el robot ejecute las instrucciones codificadas, considerando su interacción con el entorno físico; y las flechas representan no solo la toma de conciencia del programa ejecutado, sino también del impacto tangible de las decisiones tomadas durante la programación en el comportamiento del robot.
Conclusiones
En este trabajo hemos analizado una experiencia práctica con estudiantes de primer año de Ingeniería Mecánica, denominada “taller de robótica”, desde la perspectiva del constructivismo y la teoría de Piaget, vinculada al denominado marco de la robótica educativa.
En primer lugar, destacamos que dicho taller facilitó el desarrollo de conceptos de ingeniería, promoviendo el desarrollo cognitivo de los estudiantes en el área tecnológica específica. Estos aportes no fueron exclusivos ni se circunscriben a lo realizado en el taller, sino que se enmarcan y retroalimentan con el abordaje realizado en toda la asignatura Introducción a la Ingeniería Mecánica, siguiendo conceptos maker y de participación activa tanto en el aula como en el espacio FabLabUNR.
En este sentido, consideramos que existe un proceso amplio y general mediante el cual el estudiante cambia su forma de pensar y de proceder en la resolución de problemas y “aprende” una nueva lógica relacionada con la resolución de problemas en ingeniería (Rodríguez et al., 2024). La experiencia desarrollada en el taller de robótica representa un aporte a ese cambio cualitativo, aplicable a la resolución de problemas por medio de elementos propios del pensamiento computacional.
El análisis crítico de las particularidades del caso –la construcción de conocimiento sobre la resolución de un problema asignado a un robot comandado por un programa– nos permitió definir el objeto de aprendizaje como el sistema compuesto programa-robot.
En vistas de este nuevo sistema, hemos propuesto una reinterpretación de la extensión de la ley general de la cognición que plantean da Rosa Zipitria y Aguirre Dorelo (2018), identificando las implicancias que genera la incorporación del robot realizando las acciones necesarias para cumplir con el objetivo planteado. En este sentido, la construcción de conocimiento se da de forma dialéctica sobre la interacción de un programa que controla un robot y el robot controlado por dicho programa. Entendemos que esta reinterpretación constituye un aporte teórico novedoso, en el sentido de definir con mayor precisión el proceso de construcción de conocimiento en relación a la interacción con un sistema programa-robot. De esta manera, este trabajo logra un avance en la demarcación conceptual de los constructos robótica educativa y pensamiento computacional.
Finalmente, proponemos para futuros trabajos ahondar en el proceso mediante el cual los estudiantes construyen una lógica de pensamiento vinculada a la ingeniería, generando evidencia experimental sobre cómo este taller de robótica y las demás actividades propuestas en la asignatura aportan a dicho proceso, atendiendo tanto a la demanda de autores como Mejía et al. (2022) como a nuestro propio interés como docentes.
Referencias
Beth, E. W., & Piaget, J. (1966). Mathematical epistemology and psychology. D. Reidel Publishing Company.
Cetin, I., & Dubinsky, E. (2017). Reflective abstraction in computational thinking. Journal of Mathematical Behavior, 47, 70-80. https://doi.org/ggdpws
D’Angelo, V. S., Rodríguez, G. L., Sklate Boja, M. F., Pairetti, C. I., & San Martín, P. S. (2022). Robótica en FabLab: Introducción a la programación para estudiantes de Ingeniería Mecánica. Memorias de las JAIIO, 8(8), 6-23. https://sedici.unlp.edu.ar/handle/10915/156926
da Rosa Zipitria, S., & Aguirre Dorelo, A. (2018). Students teach a computer how to play a game. En S. Pozdniakov & V. Dagienė (Eds.), Proceedings of ISSEP 2018. International Conference on Informatics in Schools: Situation, Evolution and Perspectives (pp. 55-67). Springer. https://doi.org/p3vf
Gabbanelli, A. C., & Szigety, E. G. (2023). El robot como herramienta para un aprendizaje basado en la indagación en las clases de física. Revista de Enseñanza de la Física, 35, 151-158. https://goo.su/zlpWGSJ
Lodi, M., & Martini, S. (2021). Computational thinking, between Papert and Wing. Science & Education, 30, 883-908. https://doi.org/gjvp7s
Mejía, I., Hurtado, J. A., Zuñiga Muñoz, R. F., & Salazar España, B. G. (2022). Robótica educativa como herramienta para el desarrollo del pensamiento computacional: Una revisión de la literatura. Revista Digital Educación en Ingeniería, 17(33), 68-78. https://doi.org/p3vd
Piaget, J. (1964). La prise de conscience. Presses Universitaires de France.
Piaget, J. (1977). Genetic epistemology. Columbia University Press.
Piaget, J., & García, R. (1982). Psicogénesis e historia de la ciencia. Siglo XXI.
Rodríguez, G., Andrés, G., Gallucci, P., Sklate Boja, M. F., & Esquivel, I. (2024). Comunicación, integración tecnológica e innovación educativa: Análisis multidimensional de un caso en carreras STEAM. InMediaciones de la Comunicación, 19(1), 189-209. https://doi.org/p3nm
Rodríguez, G. L., San Martín, P. S., Pairetti, C. I., Sklate Boja, M. F., & Esquivel, I., (2022). Reflexiones en torno a un modelo de sostenibilidad para prácticas educativas en Spacemaker. En M. A. Moya, G. Rodríguez, A. Gallo, G. Giuliano & K. Ferrando (Comps.), Actas del VI Encuentro Nacional de Cátedras de Introducción a la Ingeniería: Diez años pensando el espacio curricular (pp. 107-111). UNR Editora. http://hdl.handle.net/2133/23773
Torres Pardo, I. D., Ferraro Gómez, F., Guzmán, Luna, J. A., & Giraldo Céspedes, C. (2019). Robótica educativa como estrategia pedagógica para construcción y aprehensión de conceptos de ciencias básicas e ingeniería. En Encuentro Internacional de Educación en Ingeniería. https://goo.su/UZxMvv
Vernal Navarrete, C. A., & Meléndez Araya, N. M. (2021). Aproximación a una perspectiva teórica de la robótica educativa. Mérito: Revista de Educación, 3(8), 105-114. https://doi.org/p3nn
Villacrés-Sampedro, J., Sampedro-Redrobán, M. C., & Andrade-Álvarez, C. E. (2020). Robótica educativa aplicada a la comprensión de la lógica proposicional. Polo del Conocimiento, 5(2), 200-225. https://goo.su/QplDhcK
Wing, J. M. (2006). Computational thinking. Communications of the ACM, 49(3), 33-35. https://doi.org/fd3h5w
Contribución de las/os autoras/es (CRediT)

1- Administración del proyecto; 2- Adquisición de fondos; 3- Análisis formal; 4- Conceptualización; 5- Curaduría de datos; 6- Escritura – revisión/edición; 7- Investigación; 8- Metodología; 9- Recursos; 10- Redacción – borrador original; 11- Software; 12- Supervisión; 13- Validación; 14- Visualización.
Notas de autor
Información adicional
Cómo citar: Esquivel, I. G., & Sklate Boja, M. F. (2025). Análisis crítico de una experiencia “taller de robótica” desde una perspectiva piagetiana. Revista IRICE, 49, e2091. https://doi.org/10.35305/revistairice.vi49.2091


